@sarathslab why your are choosing this perticular LoRa module, can you please elaborate your use case. Personally I don't have experience with this module. When i go through the details of this hardware find like this is a UART device and so you can communicate by using the AT comments. And this will be available on the datasheet I guess. Also if you don't want to use this perticular module I suggest sx1276 or LoRa E5 from Seeedstudio. And by using this you can able to connect with helium network or things network. If you want to know more about this I think Salman can help.
Best posts made by zainmuhammed
-
RE: DTDS-622C MEVB Lora modam programingposted in Development Boards

-
How to perform stability analysis of a drone?posted in General Discussion
Specifically how to find the yaw rate pitch rate and roll rate for a drone.
-
RE: MakerChat 0x16: From Dream to Flight - My Journey of Building Drone!posted in MakerChat
@alanbiju https://ardupilot.org/copter/ This is one of the best doc. the entire thing for drone building is available here. also next month, I will be releasing a doc on drone building from scratch.
-
RE: The Raspberry Pi Picoposted in Raspberry Pi
@salmanfaris Actually I can't believe this because of a perfect microcontroller in such a low cost. Definitely, this would be a great help for makers. And all specifications are really an eye-opener.
-
RE: How to perform stability analysis of a drone?posted in General Discussion
@salmanfaris I'm building a payload-releasing drone under 2kg (micro class). and the entire structure builds using carbon fiber and ABS plastic.
Latest posts made by zainmuhammed
-
RE: Gps data is not getting into TTN console after Connecting LoRa E5posted in General Discussion
@salmanfaris Today I tried after connecting a 18650 cell,
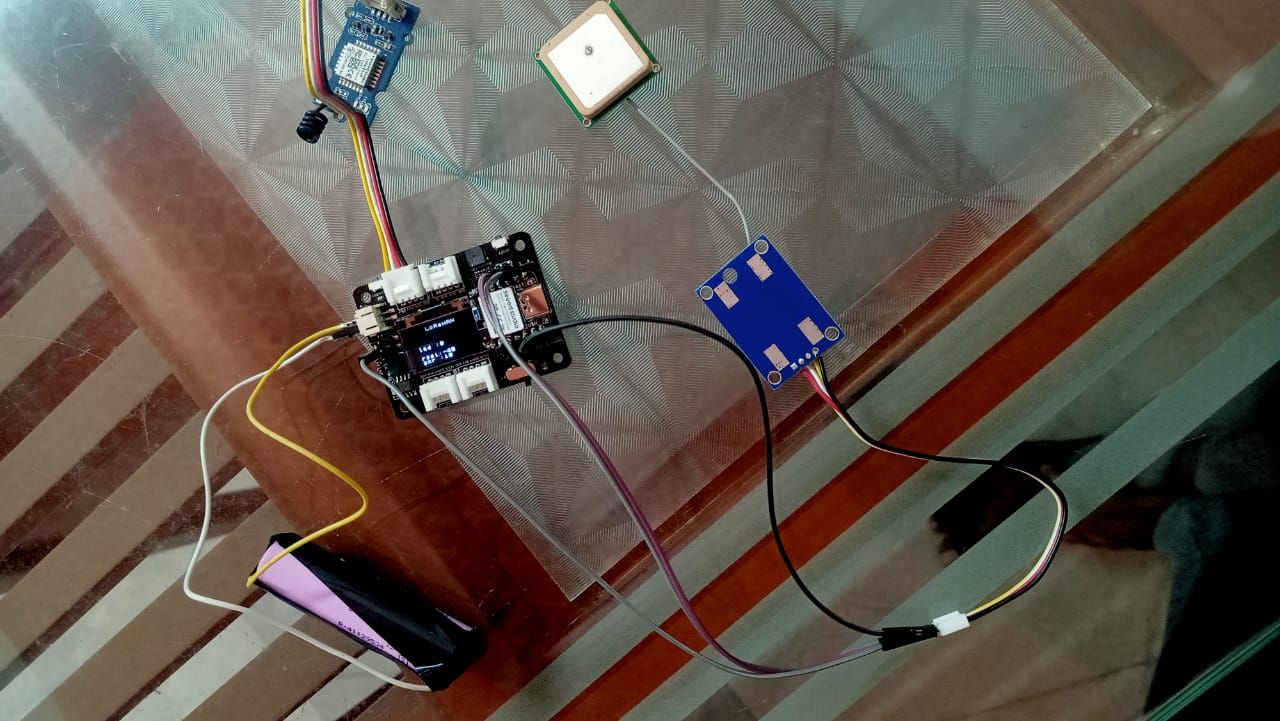
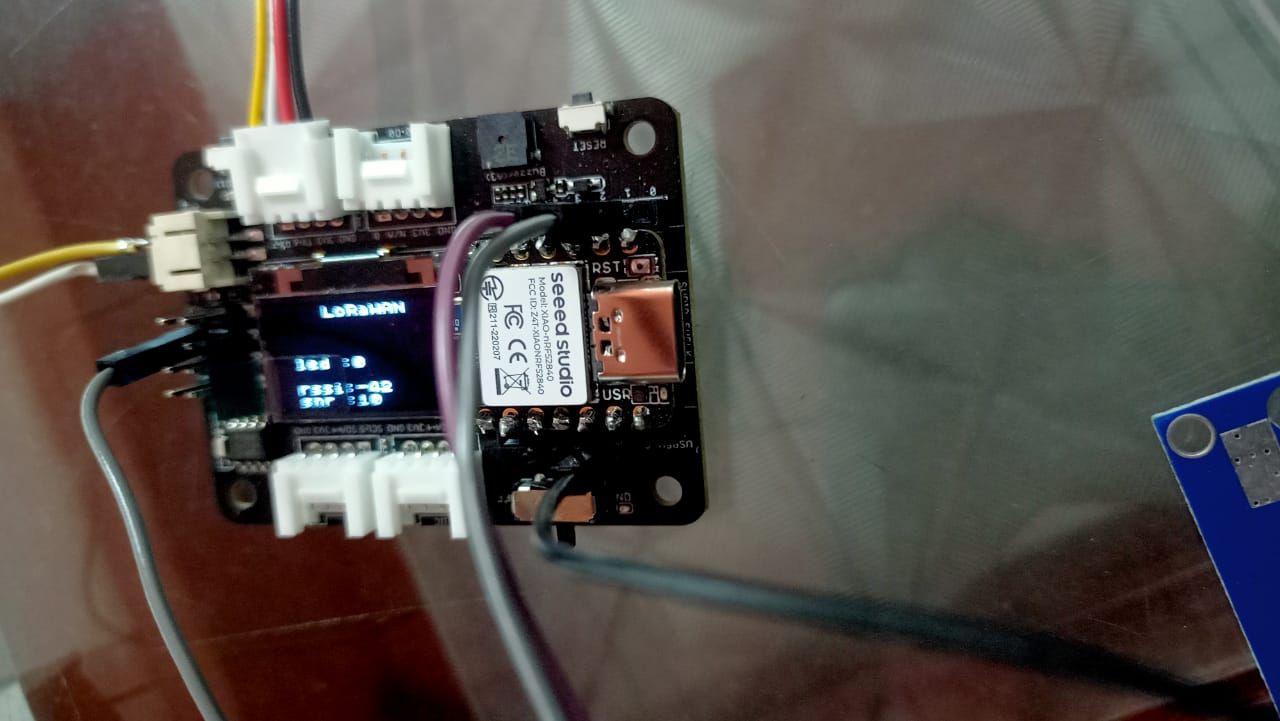
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite.
-
RE: Gps data is not getting into TTN console after Connecting LoRa E5posted in General Discussion
@zainmuhammed
this is the code#include <Arduino.h> #include <U8x8lib.h> #include <TinyGPS++.h> #include <SoftwareSerial.h> static const int RXPin = 1, TXPin = 2; static const uint32_t GPSBaud = 9600; // The TinyGPS++ object TinyGPSPlus gps; // The serial connection to the GPS device SoftwareSerial ss(RXPin, TXPin); U8X8_SSD1306_128X64_NONAME_HW_I2C u8x8(/*reset=*/U8X8_PIN_NONE); // U8X8_SSD1306_128X64_NONAME_SW_I2C u8x8(/*clock=*/ SCL, /*data=*/ SDA, /*reset=*/ U8X8_PIN_NONE); // OLEDs without Reset of the Display static char recv_buf[512]; static bool is_exist = false; static bool is_join = false; static int led = 0; static int at_send_check_response(char *p_ack, int timeout_ms, char *p_cmd, ...) { int ch; int num = 0; int index = 0; int startMillis = 0; va_list args; char cmd_buffer[256]; // Adjust the buffer size as needed memset(recv_buf, 0, sizeof(recv_buf)); va_start(args, p_cmd); vsprintf(cmd_buffer, p_cmd, args); // Format the command string Serial1.print(cmd_buffer); Serial.print(cmd_buffer); va_end(args); delay(200); startMillis = millis(); if (p_ack == NULL) { return 0; } do { while (Serial1.available() > 0) { ch = Serial1.read(); recv_buf[index++] = ch; Serial.print((char)ch); delay(2); } if (strstr(recv_buf, p_ack) != NULL) { return 1; } } while (millis() - startMillis < timeout_ms); return 0; } static void recv_prase(char *p_msg) { if (p_msg == NULL) { return; } char *p_start = NULL; int data = 0; int rssi = 0; int snr = 0; p_start = strstr(p_msg, "RX"); if (p_start && (1 == sscanf(p_start, "RX: \"%d\"\r\n", &data))) { Serial.println(data); u8x8.setCursor(2, 4); u8x8.print("led :"); led = !!data; u8x8.print(led); if (led) { digitalWrite(LED_BUILTIN, LOW); } else { digitalWrite(LED_BUILTIN, HIGH); } } p_start = strstr(p_msg, "RSSI"); if (p_start && (1 == sscanf(p_start, "RSSI %d,", &rssi))) { u8x8.setCursor(0, 6); u8x8.print(" "); u8x8.setCursor(2, 6); u8x8.print("rssi:"); u8x8.print(rssi); } p_start = strstr(p_msg, "SNR"); if (p_start && (1 == sscanf(p_start, "SNR %d", &snr))) { u8x8.setCursor(0, 7); u8x8.print(" "); u8x8.setCursor(2, 7); u8x8.print("snr :"); u8x8.print(snr); } } void setup(void) { u8x8.begin(); u8x8.setFlipMode(1); u8x8.setFont(u8x8_font_chroma48medium8_r); ss.begin(GPSBaud); Serial.begin(GPSBaud); pinMode(LED_BUILTIN, OUTPUT); digitalWrite(LED_BUILTIN, HIGH); Serial1.begin(9600); Serial.print("E5 LORAWAN TEST\r\n"); u8x8.setCursor(0, 0); if (at_send_check_response("+AT: OK", 100, "AT\r\n")) { is_exist = true; at_send_check_response("+ID: DevEui", 1000, "AT+ID=DevEui,\"xxxxx\"\r\n"); // replace 'xxxxxxxxxxxxx' with your DevEui at_send_check_response("+ID: AppEui", 1000, "AT+ID=AppEui,\"xxxxxxx\"\r\n"); // replace 'xxxxxxxxxxxxx' with your AppEui at_send_check_response("+KEY: APPKEY", 1000, "AT+KEY=APPKEY,\"xxxxxxxxx\"\r\n"); // replace 'xxxxxxxxxxxxx' with your AppKey at_send_check_response("+ID: DevAddr", 1000, "AT+ID=DevAddr\r\n"); at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n"); at_send_check_response("+MODE: LWOTAA", 1000, "AT+MODE=LWOTAA\r\n"); at_send_check_response("+DR: IN865", 1000, "AT+DR=IN865\r\n"); // Change FREQ as per your location at_send_check_response("+CH: NUM", 1000, "AT+CH=NUM,0-2\r\n"); at_send_check_response("+CLASS: C", 1000, "AT+CLASS=A\r\n"); at_send_check_response("+PORT: 8", 1000, "AT+PORT=8\r\n"); delay(200); u8x8.setCursor(5, 0); u8x8.print("LoRaWAN"); is_join = true; } else { is_exist = false; Serial.print("No E5 module found.\r\n"); u8x8.setCursor(0, 1); u8x8.print("unfound E5 !"); } u8x8.setCursor(2, 4); u8x8.print("led :"); u8x8.print(led); } void loop(void) { if (is_exist) { int ret = 0; if (is_join) { ret = at_send_check_response("+JOIN: Network joined", 12000, "AT+JOIN\r\n"); if (ret) { is_join = false; } else { at_send_check_response("+ID: AppEui", 1000, "AT+ID\r\n"); Serial.print("JOIN failed!\r\n\r\n"); delay(5000); } } else { gps.encode(ss.read()); float a=gps.location.lat(); float b=gps.location.lng(); Serial.println(a); Serial.println(b); char cmd[128]; sprintf(cmd, "AT+CMSGHEX=\"%04X%04X\"\r\n", (float)a,(float)b); ret = at_send_check_response("Done", 5000, cmd); if (ret) { recv_prase(recv_buf); } else { Serial.print("Send failed!\r\n\r\n"); } delay(5000); } } else { delay(1000); } }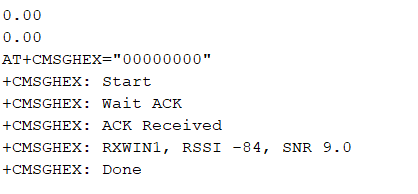
-
Gps data is not getting into TTN console after Connecting LoRa E5posted in General Discussion
I'm working on building a tracker with Xiao nrf52840 sense, Lora E5 and with NEO M8N GPS module.
Now I have completed connecting XIAO nRF SENSE, LoRa E5 with TTN and it is working properly . Also I connect GPS to Pin number 4 and 5 using SS and it's working properly.
Now both GPS and LoRa individually working properly. When I combine both GPS and LoRa, Lora in hardware serial and gps in software serial LoRa is connecting to the ttn and sending 0, 0 as latitude and longitude. And also I give a separate power for GPS.anyone can help me to fix the issue
-
RE: Error while uploading the program in to ESP32 -S3 senseposted in ESP32
I suggest to change the firmware. For this you can download the firmware from seeedstudio wiki https://files.seeedstudio.com/wiki/SeeedStudio-XIAO-ESP32S3/res/XIAOESP32S3-Sense-firmware.zip
And use esptool to upload the firmware https://espressif.github.io/esptool-js/
-
RE: DTDS-622C MEVB Lora modam programingposted in Development Boards
@sarathslab why your are choosing this perticular LoRa module, can you please elaborate your use case. Personally I don't have experience with this module. When i go through the details of this hardware find like this is a UART device and so you can communicate by using the AT comments. And this will be available on the datasheet I guess. Also if you don't want to use this perticular module I suggest sx1276 or LoRa E5 from Seeedstudio. And by using this you can able to connect with helium network or things network. If you want to know more about this I think Salman can help.
-
RE: MakerChat 0x16: From Dream to Flight - My Journey of Building Drone!posted in MakerChat
@alanbiju https://ardupilot.org/copter/ This is one of the best doc. the entire thing for drone building is available here. also next month, I will be releasing a doc on drone building from scratch.
-
RE: How to perform stability analysis of a drone?posted in General Discussion
@salmanfaris I'm building a payload-releasing drone under 2kg (micro class). and the entire structure builds using carbon fiber and ABS plastic.
-
How to perform stability analysis of a drone?posted in General Discussion
Specifically how to find the yaw rate pitch rate and roll rate for a drone.
-
RE: The Raspberry Pi Picoposted in Raspberry Pi
@salmanfaris Actually I can't believe this because of a perfect microcontroller in such a low cost. Definitely, this would be a great help for makers. And all specifications are really an eye-opener.