how did sudo command solved can't open device "/dev/ttyUSB0": Permission denied?
-
@arunksoman thanks for the steps
but the thing is I don't have issues with port now, I was curious how it got resolved without going through the usual steps but by using sudo command. -
@Abhay What did you mean by usual steps?
-
@arunksoman by usual steps I meant adding our user to the group.
ie the step
sudo usermod -a -G dialout <username> -
@Abhay I think most probably you might have done this earlier while installing Arduino.
-
@arunksoman thanks,
I will look more into it. Thanks again
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
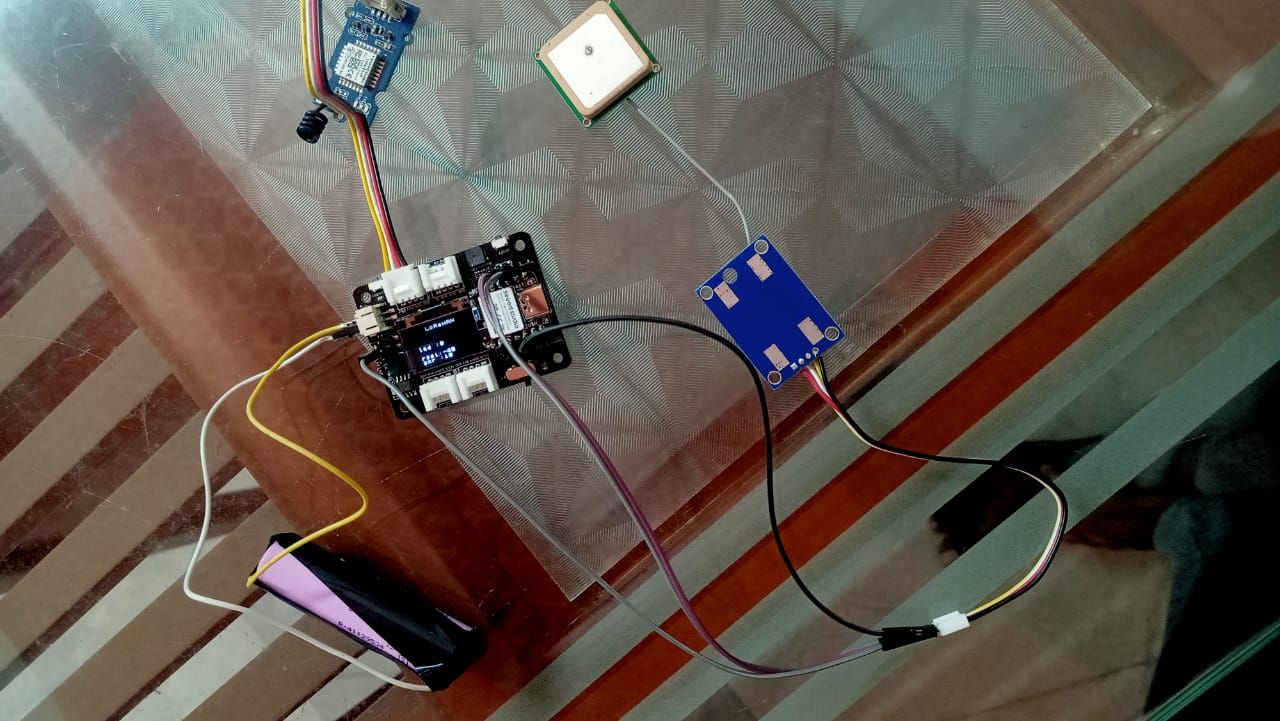
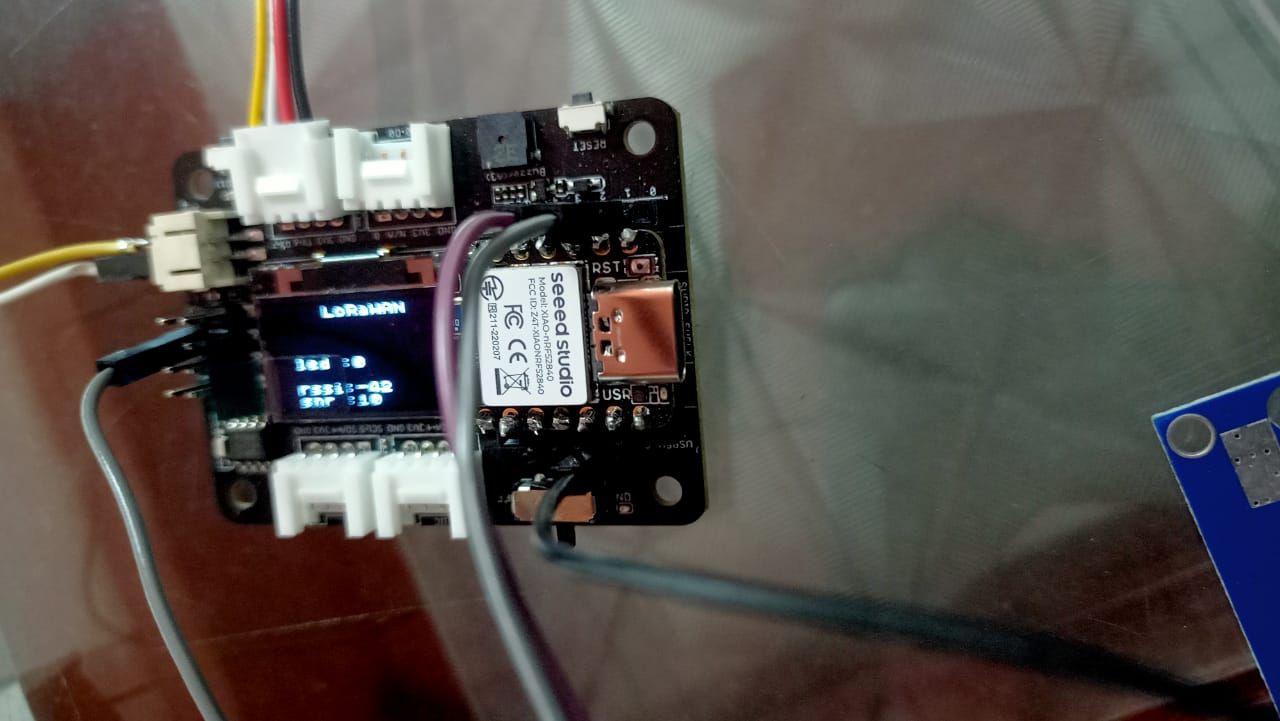
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.