Soil level measurements under water
-
I want to make a device which measure the level or quantity of soil deposited under a tank containing water (sedimentation). Any one help please.
-
@Geethesh I guess you have asked the same application with a different name "Water Depth Sensor". But anyways, You can use Sharp IR sensor for calculating the sedimented soil in a water tank.
-
@kowshik1729 ok
-
Did you find the sensor?
-
@salmanfaris
No -
@Geethesh I was talking about this sensor.

Sharp GP2Y0A21YK0F
Recent Posts
-

MatjarX is a results-driven web development company in Karachi focused on helping small businesses get online quickly and affordably. We specialize in done-for-you websites built in just 7 days, combining strategic design, technical development, SEO services, website concierge assistance, and growth marketing under one roof. Our team of global professionals works closely with clients to remove the stress of launching and managing a website, ensuring every business has the tools, visibility, and ongoing support needed to grow confidently in the digital world.
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
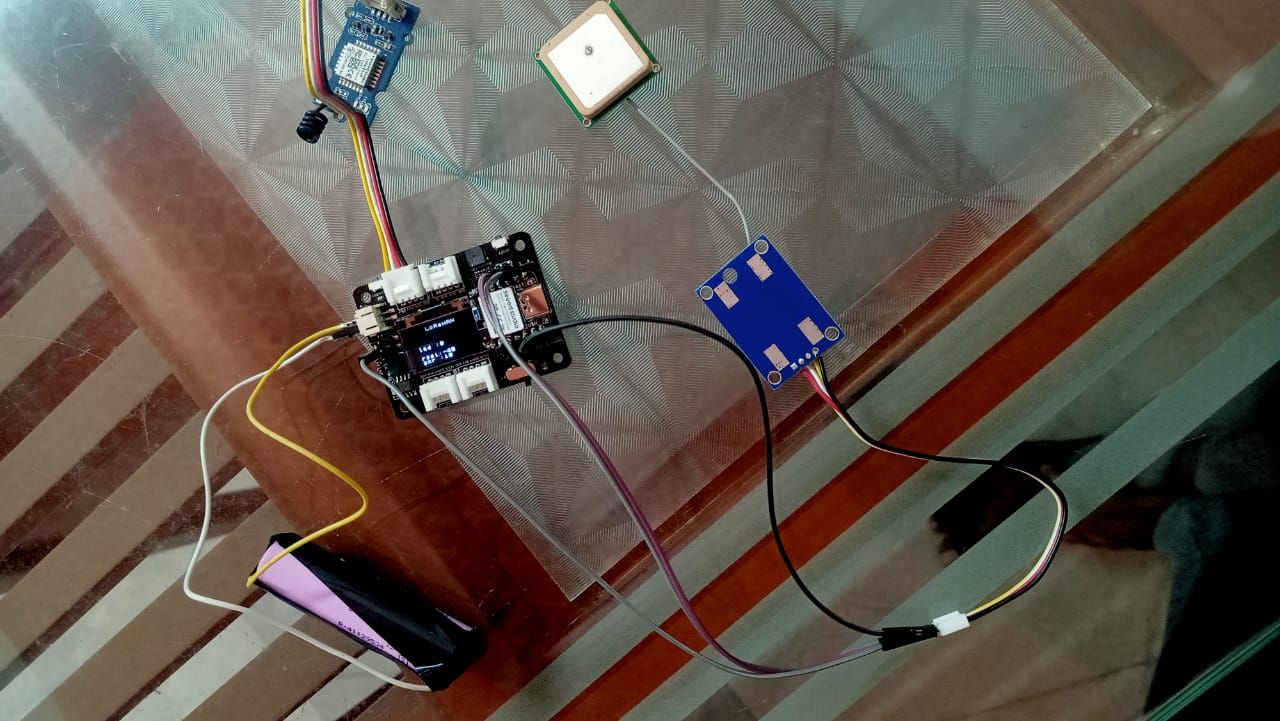
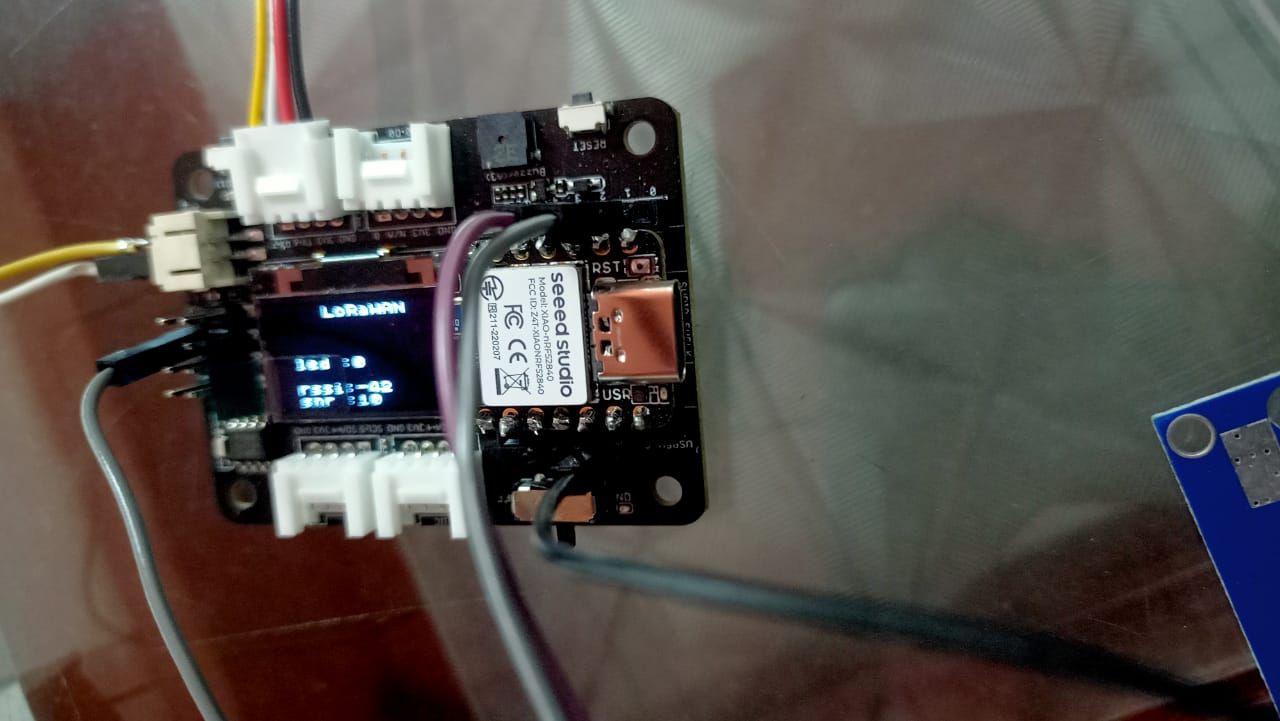
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite.