Error on Raspberry PI 4 while opening TensorFlow.
-
@sreu13 It is possible and a far far better method.
-
@arunksoman thankyou so much...your reply really busted the stress out of me...can you help with any documentations which i could possibly go through
-
@sreu13 is the problem solved?
-
@salmanfaris actually not at all solved!!..the problem is that...i do not know how to send data from raspberry pi to Google vm and get the results back from google vm to RPI4. I've researched a lot online...but cant find a proper route
-
@sreu13 You have to deploy a flask server on your Google cloud instance. Also create local flask server on your RasPi. Upload your image on RasPi flask server. Convert image to base64 format. Send naseer image to flask server deployed on Google cloud instance. Then convert back base64 normal image file. Then process image on your flask server. It might solve your problem.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
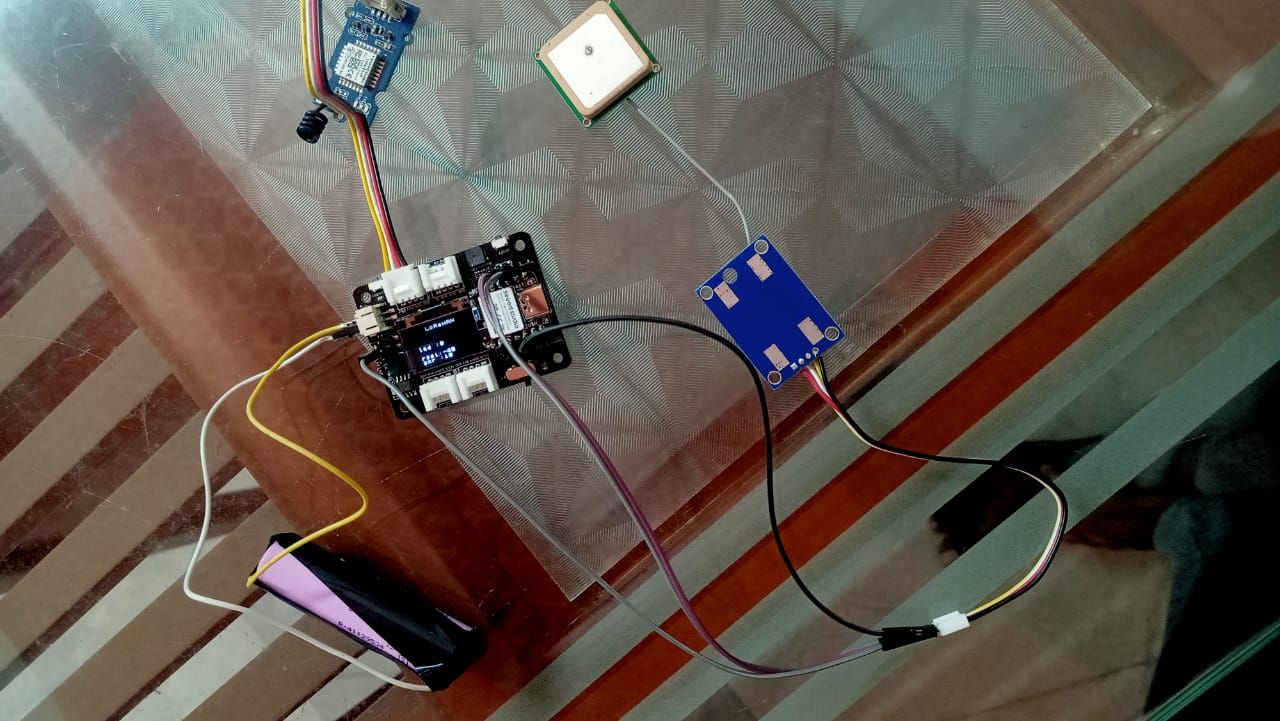
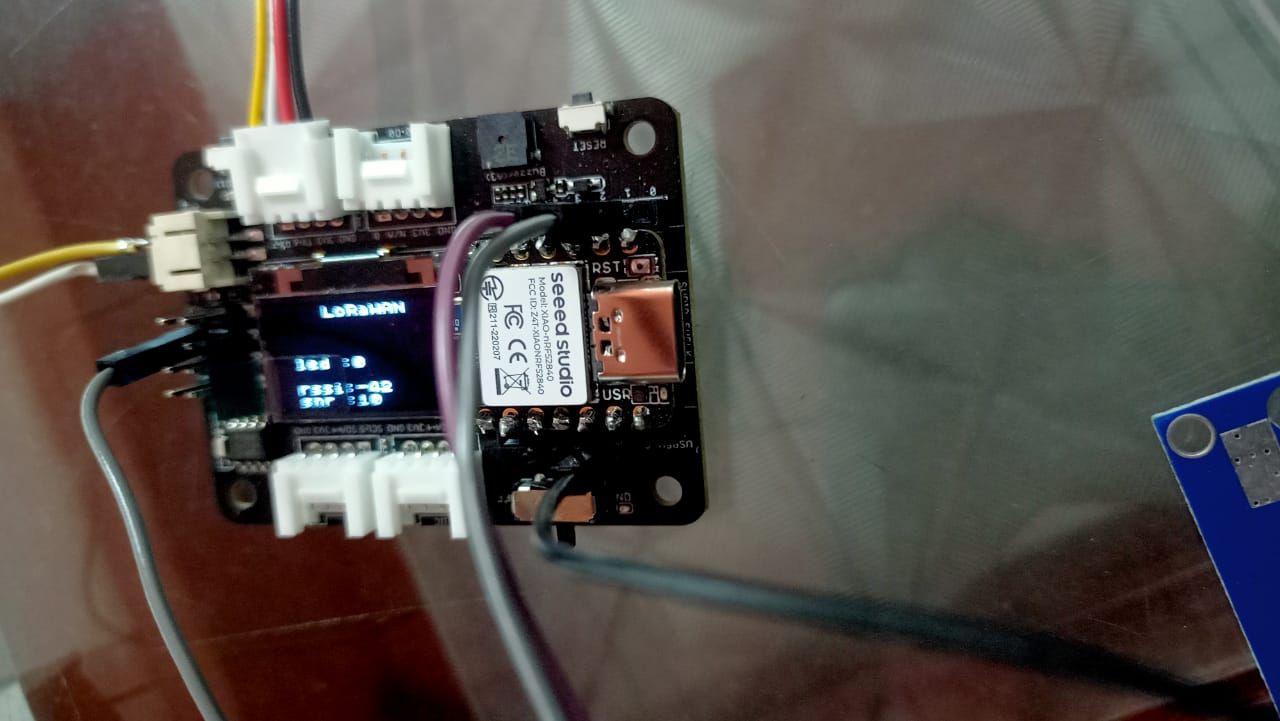
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.