ESP8266 Restart while running ISR. [ESP8266 FreeRTOS SDK]
-
I'm trying to pass a value into Queue from Interrupt Service Routine(ISR) using
xQueueSendFromISR()<-- ReferenceBut I'm getting this error and ESP restart immediately.
Guru Meditation Error: Core 0 panic'ed (LoadProhibited). Exception was unhandled. Core 0 register dump: PC : 0x4021227c PS : 0x00000033 A0 : 0x4021c72e A1 : 0x3ffe8220Here is the gpio interrupt example which I'm following.
Here is my code. I did some modification in this.
Check 70th line of this location.
static void main_power_isr_handler(void* arg) { xQueueHandle* main_q = (xQueueHandle*)arg; static main_q_payload_t msg; msg.hdr = E_MAIN_MSG_MAIN_POWER_STATUS; msg.bool_payload = gpio_get_level(GPIO_MAIN_POWER); //ets_printf("Someone Interrupted \n "); xQueueSendFromISR(main_q, &msg, NULL); //!!! THIS LINE } -
Update!!
I found the issue
I created a Queue inside Rgpio.cpp and called a Funciton from main.cpp to check data in Queue. That worked well!!Reference to the #commit .
-
BaseType_t xQueueSendFromISR ( QueueHandle_t xQueue, const void *pvItemToQueue, BaseType_t *pxHigherPriorityTaskWoken );I was trying to pass a pointer. That was the issue.
Reference -
Thanks for sharing @rafitc99 . Glad to know that it was solved.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
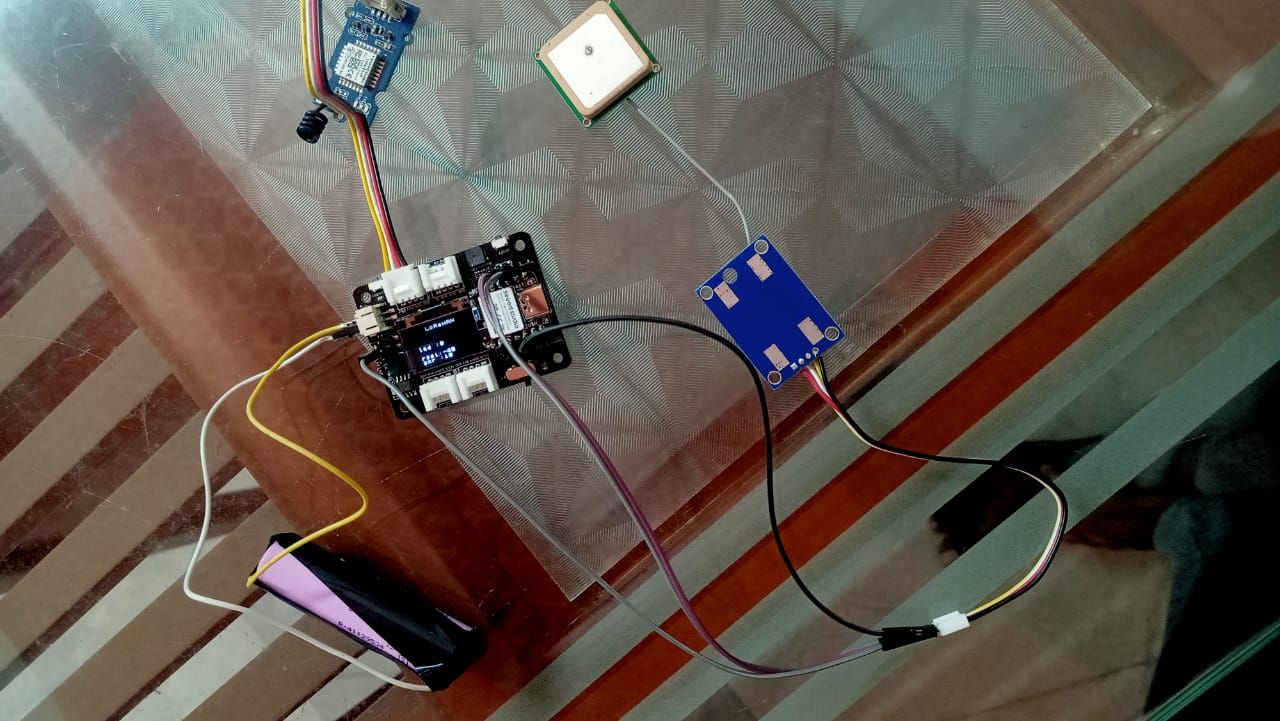
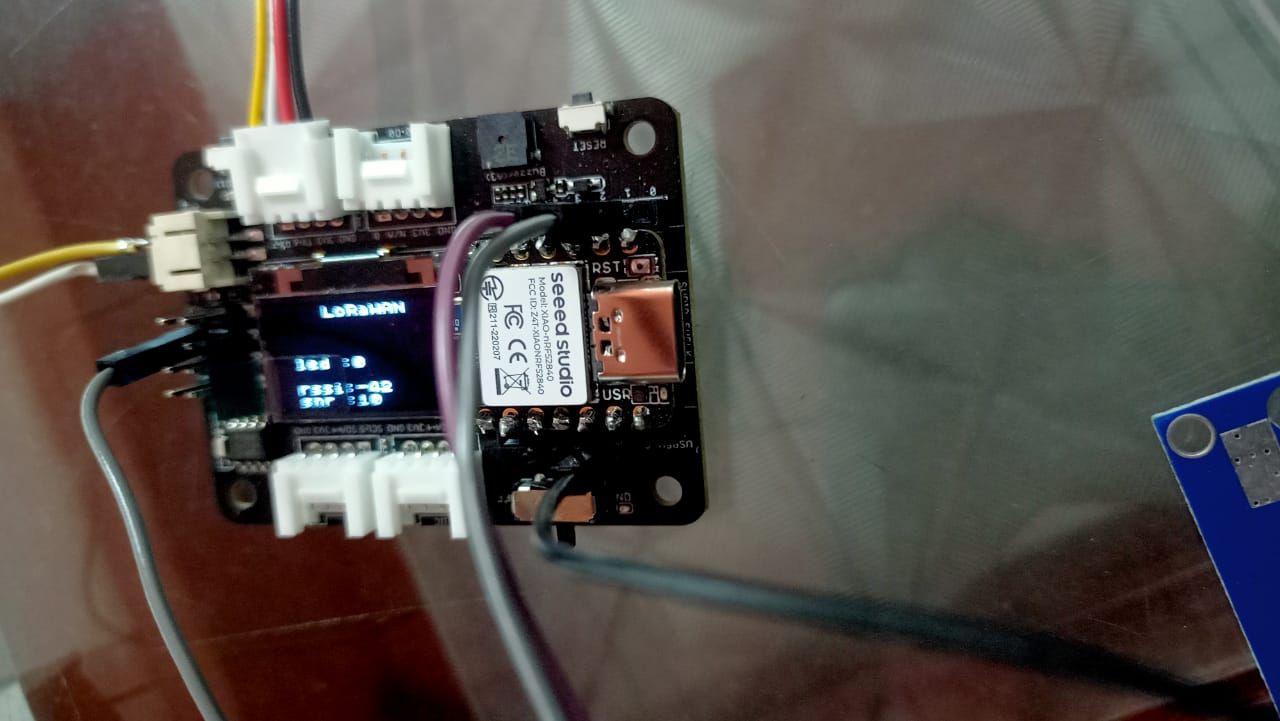
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.