Understanding the raw output of MPU-6050
-
Hello all,
I have a small doubt regarding the raw values given by MPU 6050.
I am getting 6 raw values from the MPU 6050 sensor!
I have given a default sensitivity of +/- 2g.
What exactly each value mean? Is it like, voltage values across each axis or capacitance values or the acceleration values itself.
But for me they doesn't mean anything. I am getting some values above 1000, some of them in negative and some doesn't go beyond +/- 250.
So, can you explain me in detail what does those value mean in physical parameters and their units?Thank you!!
-
Hi @Anudeep ,
MP66050 is a Gyroscope + Accelerometer + Temperature Sensor Module ,
3-Axis Gyroscope
The 3 Axis Gyroscope is used to detect rotational velocity along the X, Y, Z axes as shown in the below figure.
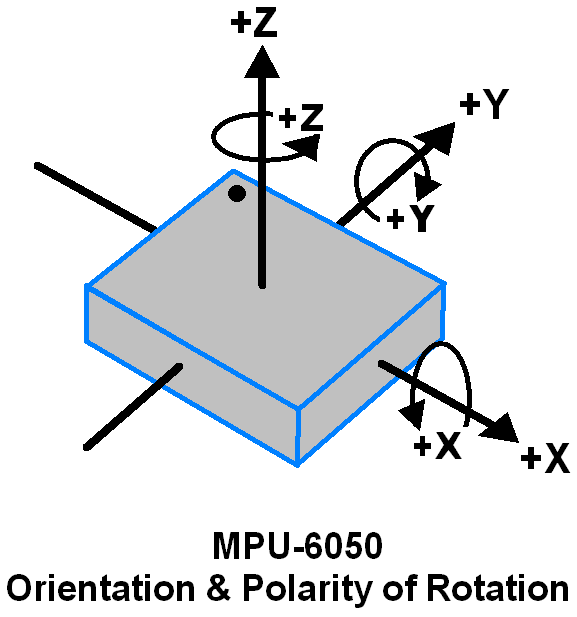
img src : https://www.electronicwings.comThe full-scale range of output is +/- 250, +/- 500, +/- 1000, +/- 2000 , and that is the angular velocity represented in units of rotations per minute (RPM), or degrees per second (°/s). The three axes of rotation are either referenced as x, y, and z, or roll, pitch, and yaw.
3-Axis Accelerometer
Accelerometers are devices that measure acceleration, which is the rate of change of the velocity of an object, it can be used to detect the angle of tilt or inclination along the X, Y and Z axes as shown in below figure.
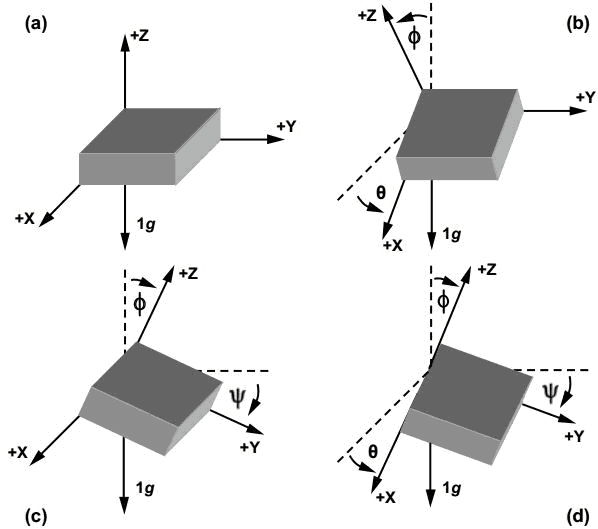
img src : https://www.electronicwings.comThey measure in meters per second squared (m/s2) or in G-forces (g). A single G-force for us here on planet Earth is equivalent to 9.8 m/s2, but this does vary slightly with elevation (and will be a different value on different planets due to variations in gravitational pull)
datasheet : https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Datasheet1.pdf
Recent Posts
-

-
@codelery said in Help needed: Arduino Wireless Notice Board project:
I am using the hardware serial (pin 0 and 1 on Arduino Uno)
As @rafitc99 mentioned, you need to expand the Serila buffer, in the hardware serial also the Arduino board package implements a 64-byte ring buffer for send and receive on the hardware serial messages. So you need to change that to 256 as per your message length.
