How to perform stability analysis of a drone?
-
Specifically how to find the yaw rate pitch rate and roll rate for a drone.
-
@zainmuhammed Curious to know, What kind of drone are you building and what kind of material are you using?
-
@salmanfaris I'm building a payload-releasing drone under 2kg (micro class). and the entire structure builds using carbon fiber and ABS plastic.
-
@zainmuhammed Oh that's cool. Let me also take a look at the stability analysis of a drone and get back to you.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
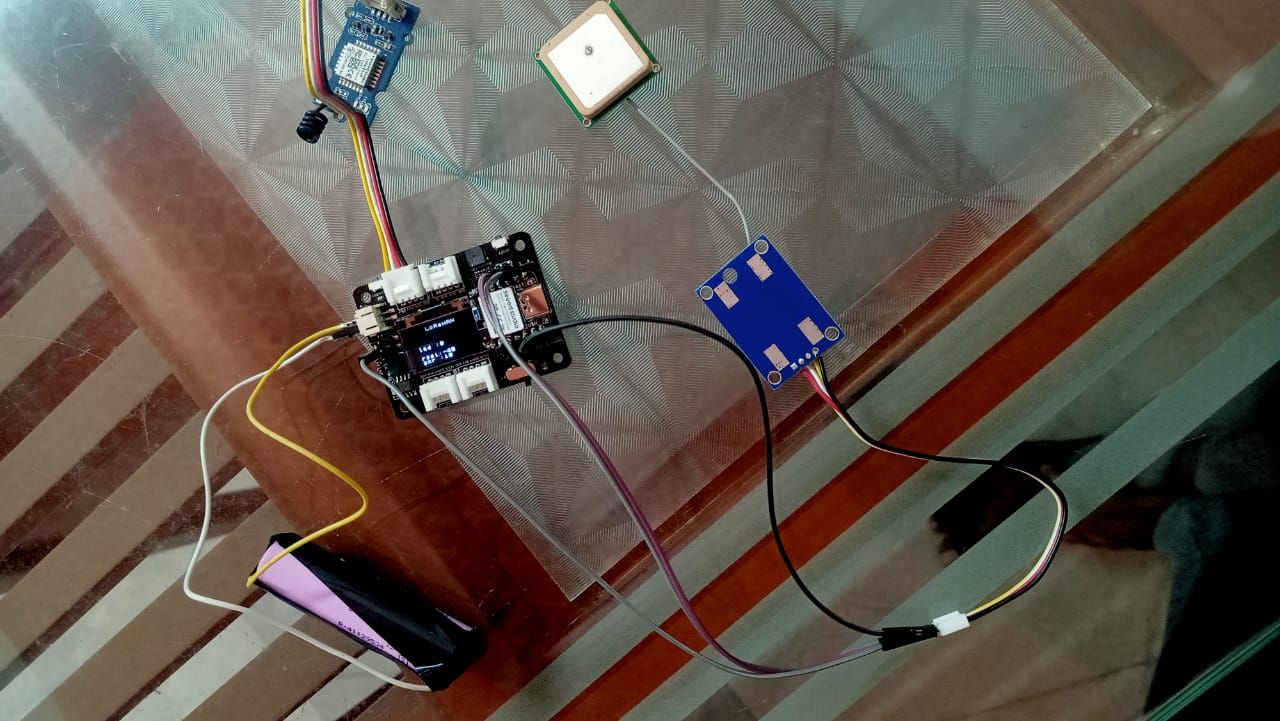
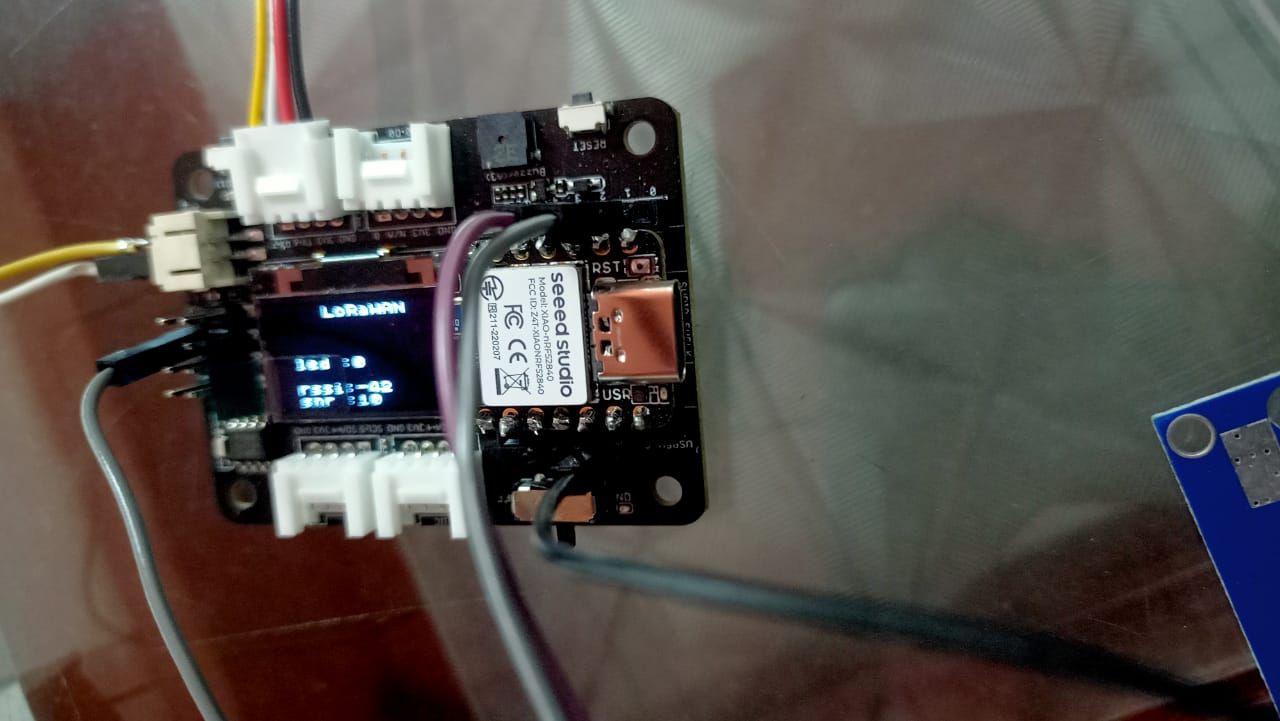
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.