Edge Impulse Inference to IoT Dashboard
-
@dipu_varghese The serial data from the prebuilt inferencing binary will be a little big with string size as it comes with all inferencing data points and it's confidence level plus the model information, you might only need the inferencing score or the inferencing data, so you can filter that out and send that to the cloud. Hope you get the idea. Let me know if you need an example.
-
Thank you for your response! @salmanfaris
")
It makes sense that filtering out the specific data points that are needed and sending them to the cloud would be the way to go.
If it's not too much trouble, could you please provide me with an example of how to filter out and send only the necessary inferencing data to the cloud?
Thank you again for your help!
Best,
Dipu -
@dipu_varghese Sure, I'll try to make an example in one coming day and share.
-
@salmanfaris I really appreciate your help and look forward to seeing the example.
Best,
Dipu -
@salmanfaris Hope you're doing well, did you get sometime to work on this?
Best,
Dipu -
@salmanfaris any updates?
Best,
Dipu -
Hi @dipu_varghese ,
Here is the sample input from the binary edge impulse inference,
Predictions (DSP: 16 ms., Classification: 1 ms., Anomaly: 2 ms.): idle: 0.91016 snake: 0.08203 updown: 0.00391 wave: 0.00391 anomaly score: -0.067”And from here for example we can try to get the updown values only by attaching the device to another controller and read the Serial string directly.
void setup() { // Start serial communication at 9600 baud Serial.begin(9600); } void loop() { // Wait until there is data available on the serial port while (!Serial.available()) { // Do nothing } // Read the input string from the serial port String inputString = Serial.readStringUntil('\n'); // Find the position of the "updown" value in the input string int updownPos = inputString.indexOf("updown:"); // If the "updown" value was found in the input string if (updownPos >= 0) { // Extract the "updown" value from the input string String updownString = inputString.substring(updownPos + 8, inputString.indexOf('\n', updownPos)); // Convert the "updown" value to a float float updownValue = updownString.toFloat(); // Output the "updown" value Serial.println(updownValue); } }The sketch should then output the "updown" value, which is 0.08203.
Hope this will be helpful, let me know if you need more clarification.
-
@salmanfaris thank you so much man, I'll try this and update you shortly. Thank you once again.
Best,
Dipu -
@dipu_varghese Hi, How does it go? Would like to know about the updates
or anything I can do to help you.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
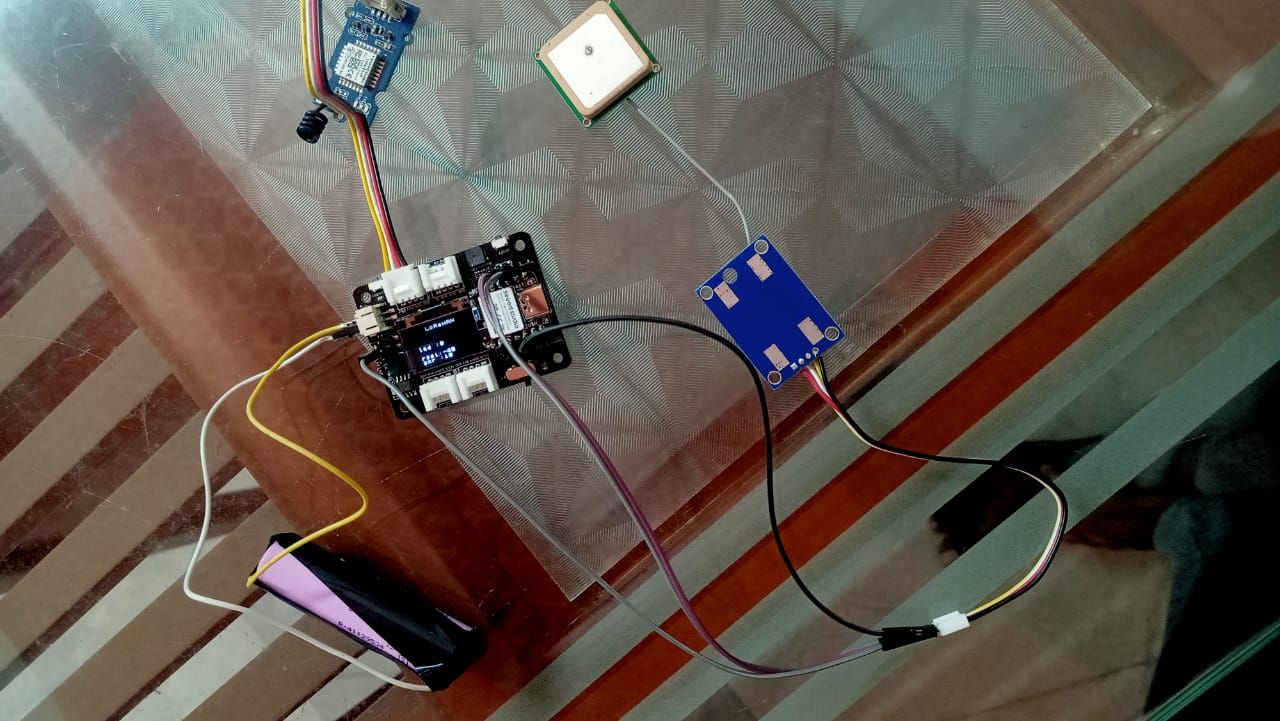
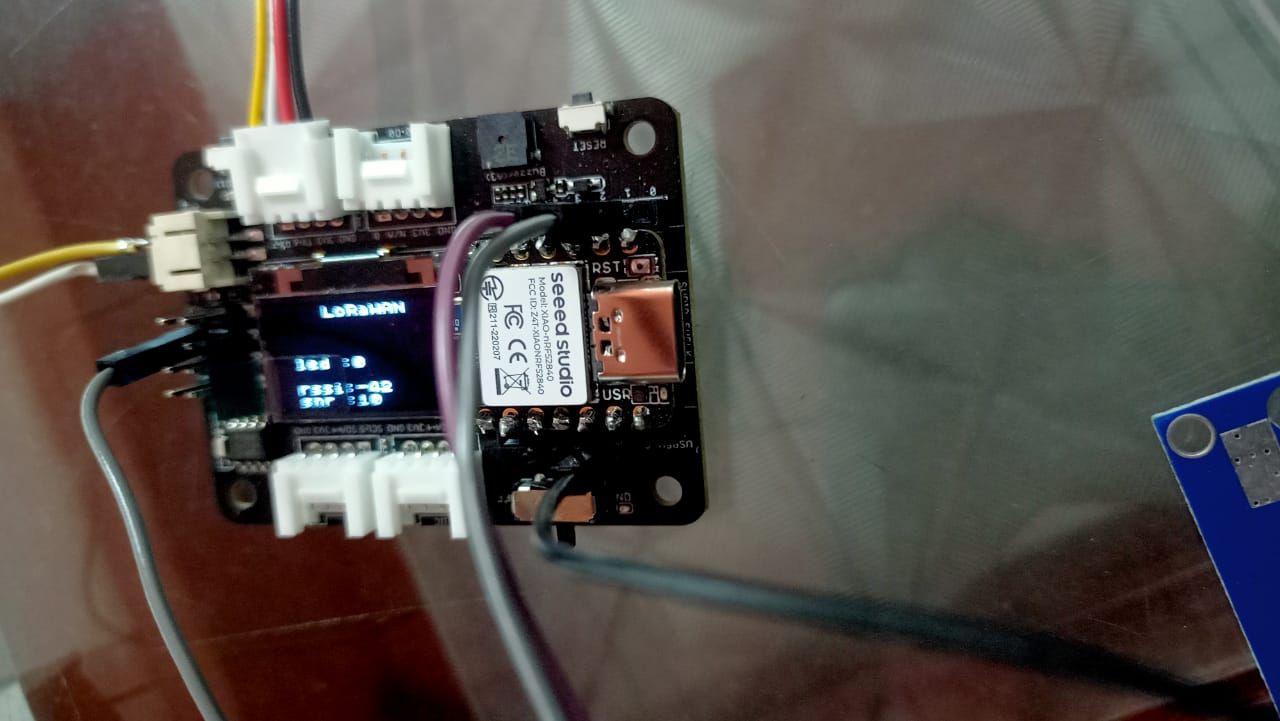
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.