python method vs function
-
Method is called by its name, but it is associated to an object (dependent).
A method is implicitly passed the object on which it is invoked.
It may or may not return any data.
A method can operate on the data (instance variables) that is contained by the corresponding class
Function is block of code that is also called by its name. (independent)
The function can have different parameters or may not have any at all. If any data (parameters) are passed, they are passed explicitly.
It may or may not return any data.
Function does not deal with Class and its instance concept.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
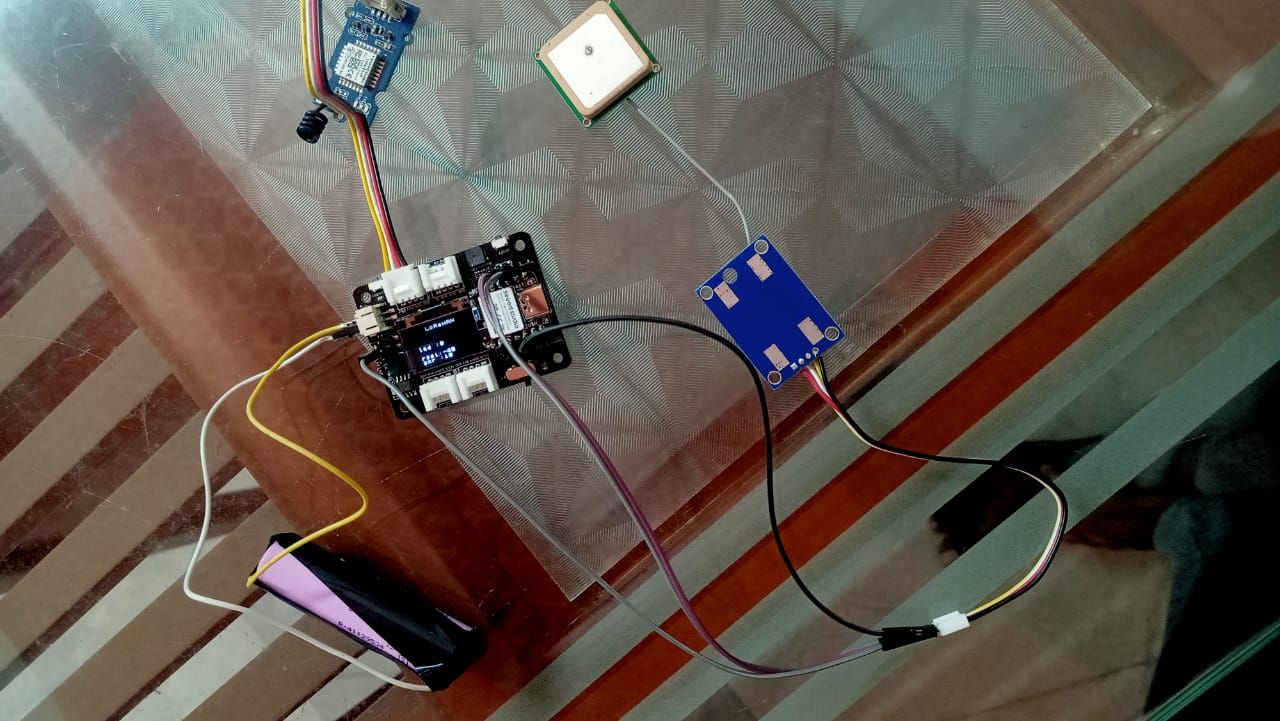
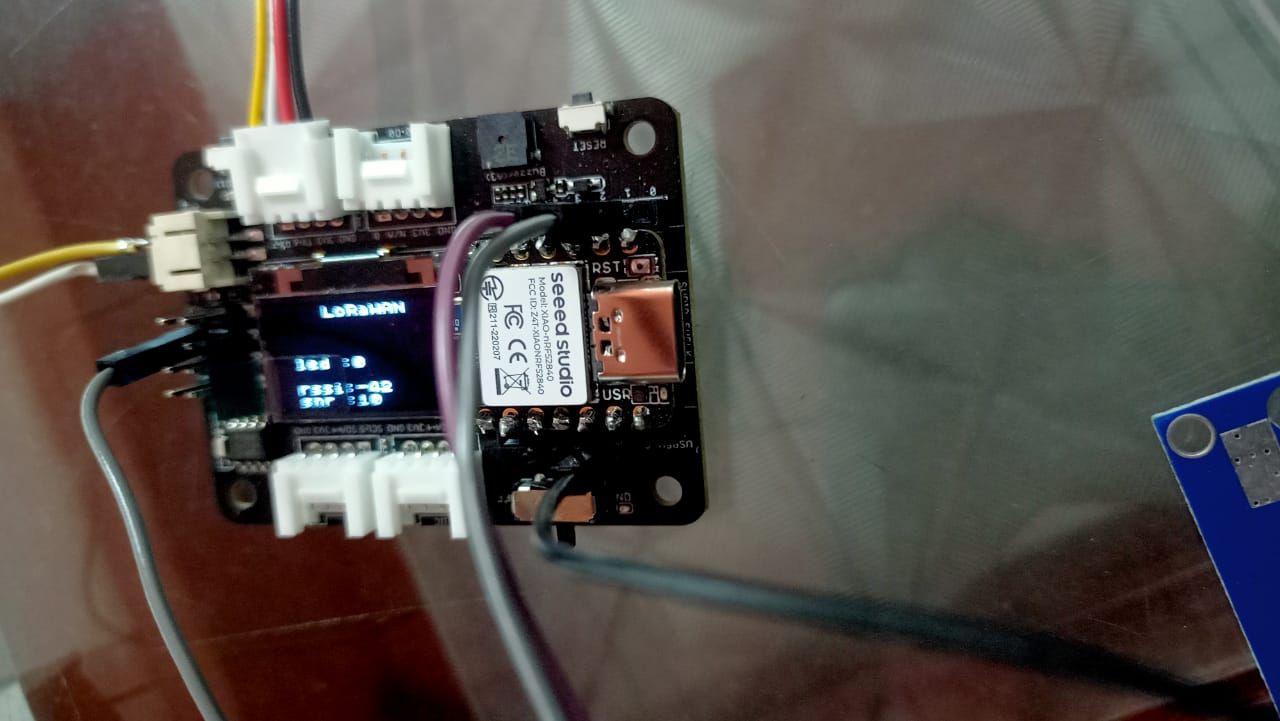
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.