Capacitive touch sensor for Arduino
-
Hey guys,
I am in a search of capacitive touch sensors. The functionalities I'm aiming at are
The capacitive touch should be able to recognize up, down and sideways slides on the Grid. Has anyone used the this type of module? If yes please do suggest me. Thanks in advance...!!
-
This can be done using captive grid. You can buy a touch pad
https://www.arrow.com/en/products/dm160219/microchip-technology?gclid=Cj0KCQjwmdzzBRC7ARIsANdqRRnOu-n2vJtXa6VRqepktBLdxhyTriIVXNe2ZSHokhzs4U3je6cburkaAqk9EALw_wcB
or you can make your own PAD
http://ww1.microchip.com/downloads/en/DeviceDoc/AN2934-Capacitive-Touch-Sensor-Design-Guide-00002934A.pdf
please refer 13th page of this documentation.
if you like to make one MPR121 is a nice choice
https://www.sparkfun.com/datasheets/Components/MPR121.pdf -
@kowshik1729
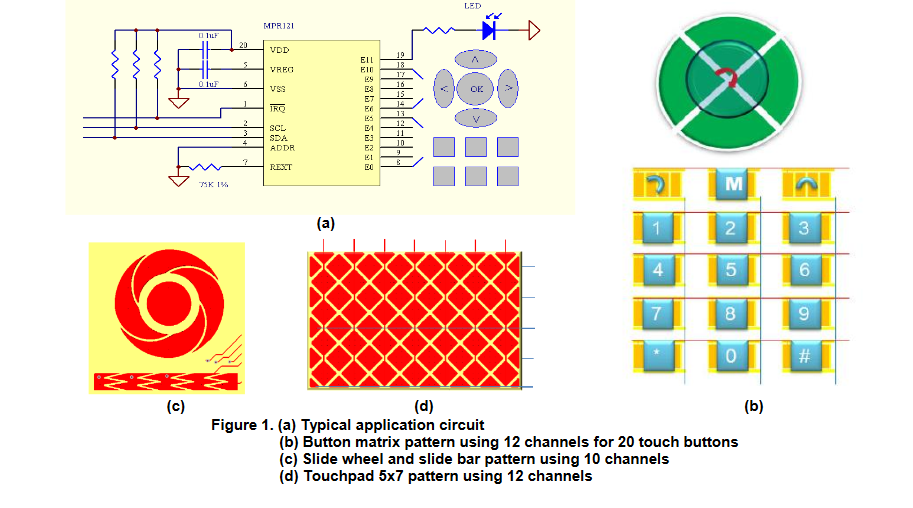
Design C is also good, -
@Akhil Thanks. I am not in a state to design my own capacitive touch so I am going with already made modules. But the one which you have posted is too very expensive for my application. Are there any other modules that are a bit more cheaper.
-
Hey @kowshik1729, why don't you use a five of the touch keys(shown below), form them up in the shape of a cross and get the sequential data across two of those sensors to detect a left/right or up/down swipe?
https://robokits.co.in/sensors/touch-sensor/capacitive-touch-module-based-on-ttp223
-
@SuperGops Woow that's a great idea...I shall try this out..!!
-
@kowshik1729 That is also Nice idea, If you want only Up,Down, Left, Right movements then try this method suggested by @SuperGops
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.