Gaming steering wheel setup
-
@vipin-i-v Great, Please let us know the updates, excited to see in action.
-
@salmanfaris well i don't know where to start...
-
@vipin-i-v What about following the tutorial you mentioned?
-
@salmanfaris i guess yes...that would be the best and suitable for me..
-
@vipin-i-v I think so, let us know the updates!
-
Hi @Vipin-I-V ,
This seems to be an interesting project.
Please share the development here...
I was thinking of something similar, but not for gaming. Won't it be cool to have the Ctrl, Cmd & Alt keys as pedals? Please share your thoughts & insights.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
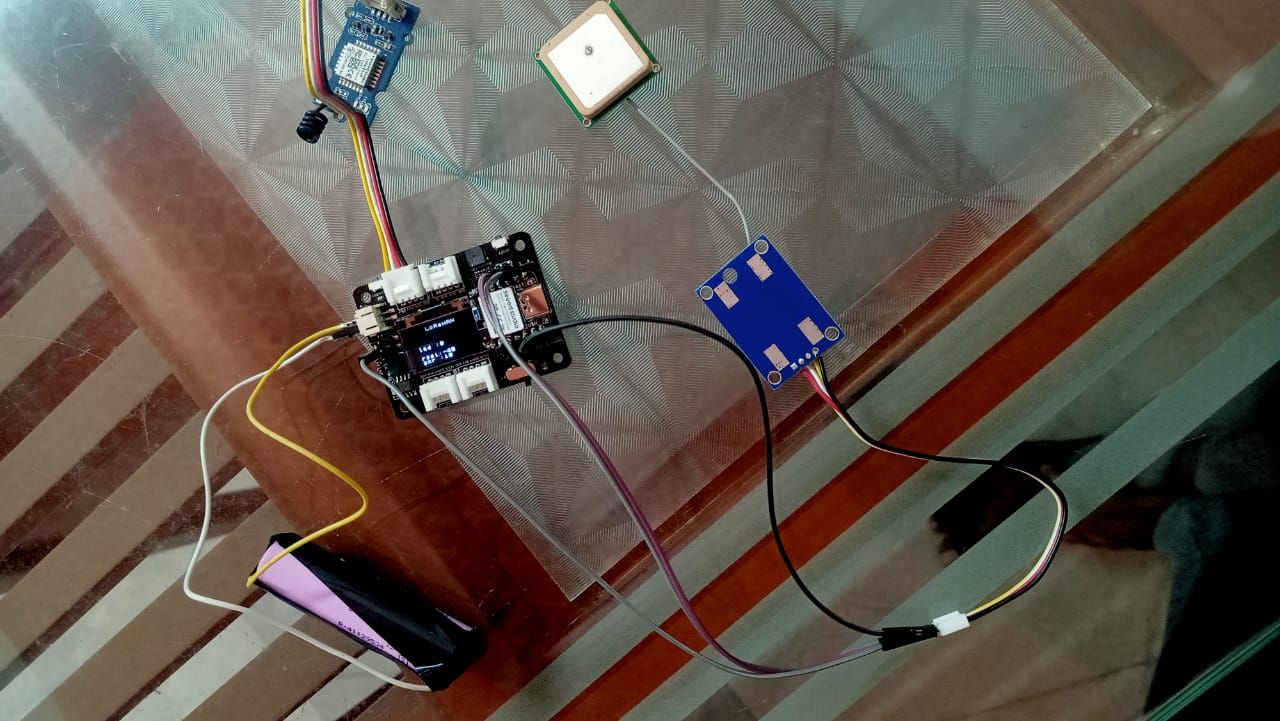
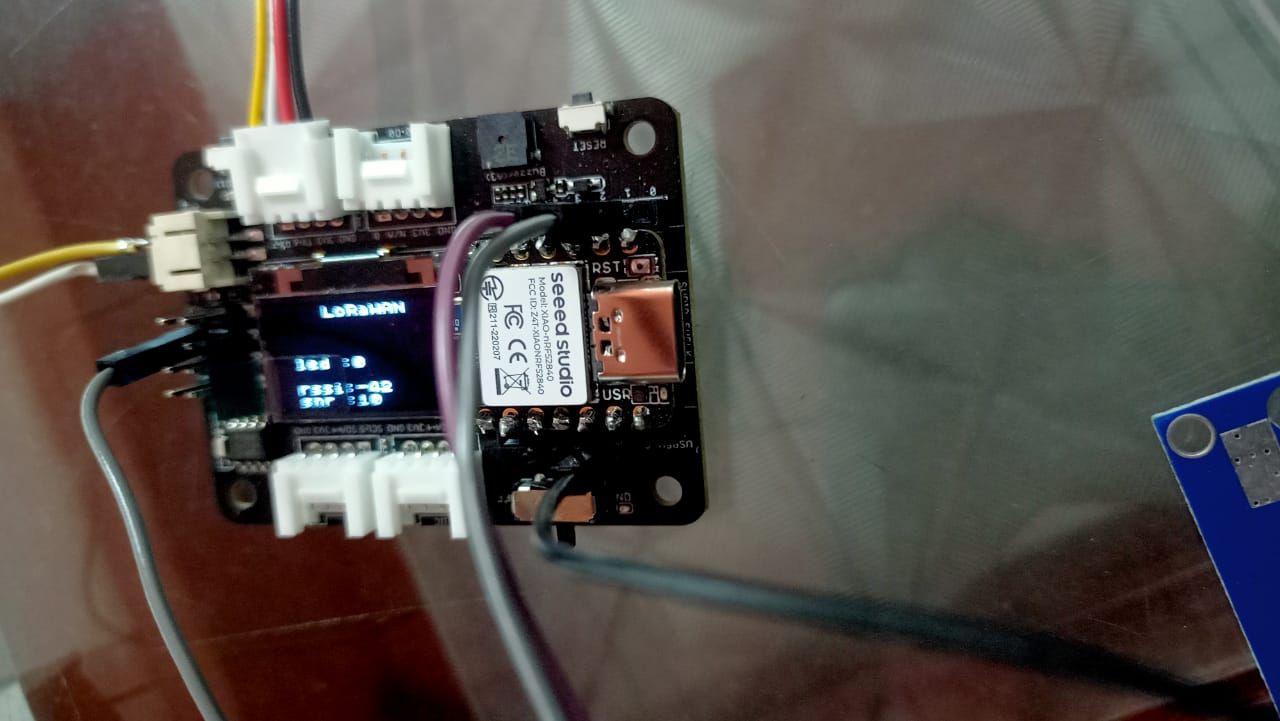
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.