Help needed for drone simulator for Mac
-
Project help: Problem with connecting tx(avionic rcb6i) as a joystick to my Mac using aux cable! Does anyone know any suitable driver(to recieve and decode ppm signals from tx and encode and transmit ppm to tx)?
-
Hi @iero , Any updates?
-
I dropped the idea of using simulators and learn flying and to do acrobatics (Because of the trouble I got while connecting my old TX to Mac)
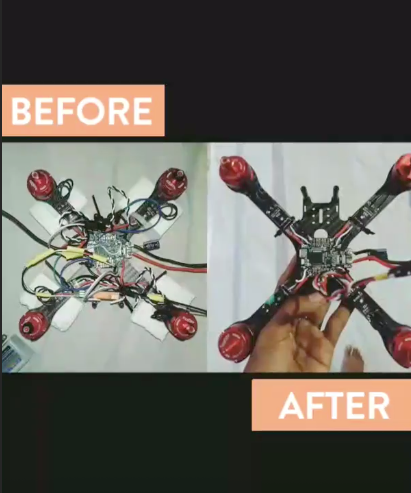
meanwhile, I tried flying my drone(that I build) outdoor, I know it's gonna difficult, I know it will crash for sure, but it's okay if it crashes I will build again and will fly again so I can learn from that.
but due to the academics, I didn't get much time to fly. and last time I flew, it crashed like a hell, damaged a lot of parts
like a hell, damaged a lot of parts but I rebuilt it successfully,
but I rebuilt it successfully,
Now it's ready to fly and I'm sure I will fly again
-
Sharing some photos of the build



Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
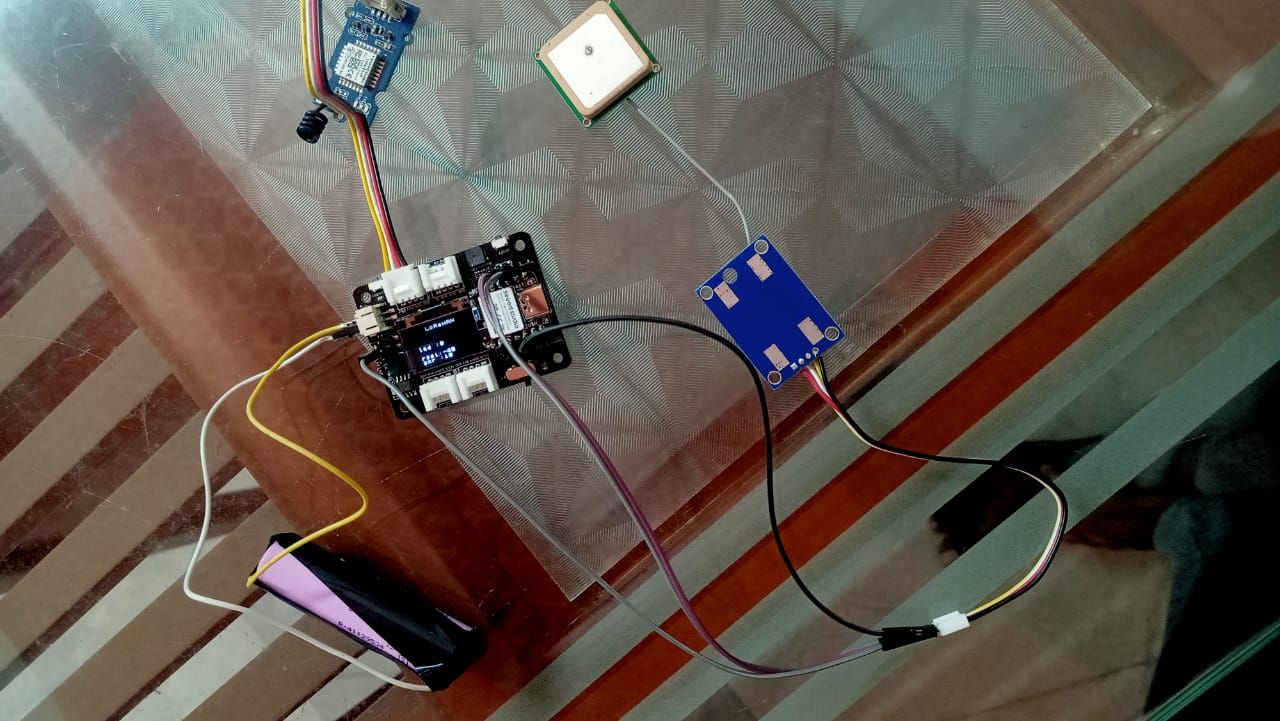
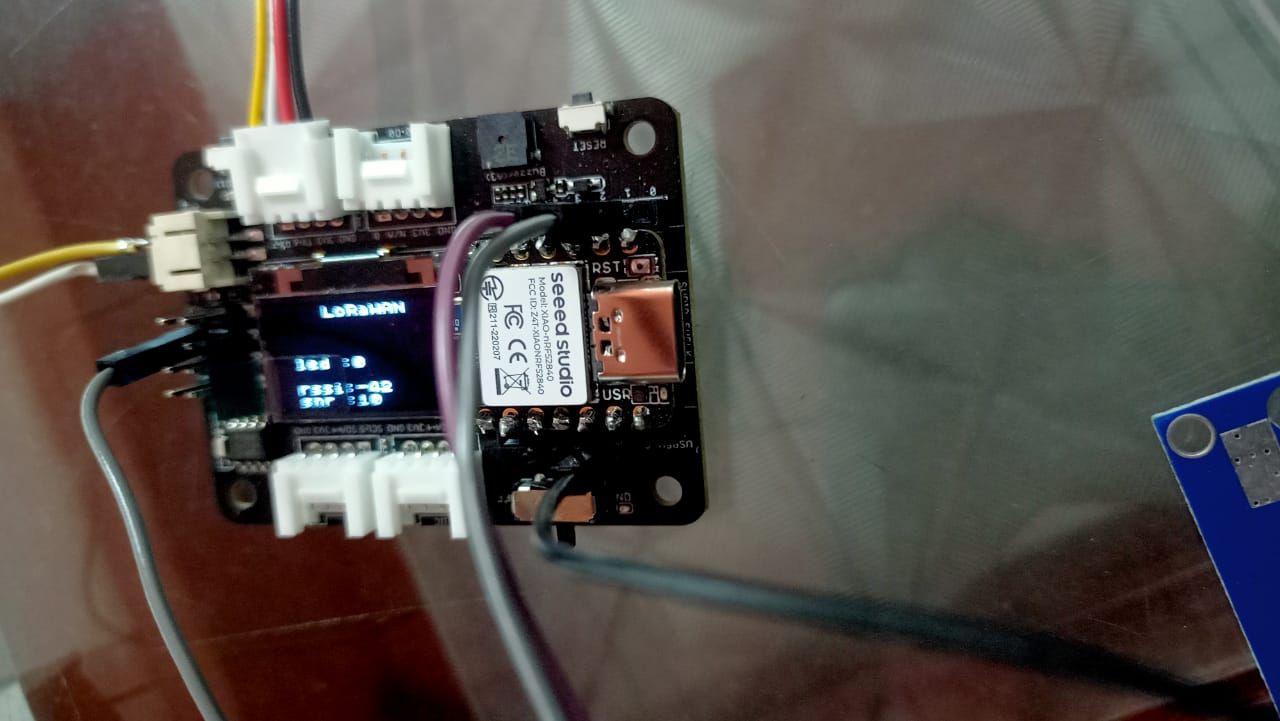
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.