8085 Microprocessor
-
In general, the 8085 is an 8-bit microprocessor that was introduced by the Intel team in 1976 using NMOS technology. The microprocessor has been updated with this processor. The 8085 microprocessor has the following configurations: data bus (8 bits), address bus (16 bits), programme counter (16 bits), stack pointer (16 bits), registers (8 bits), +5V voltage supply, and operates at 3.2 MHz single segment CLK. Microwave ovens, washing machines, and other electronic devices use the 8085 microprocessor. The 8085 microprocessor has the following characteristics:
This microprocessor is an 8-bit device that receives, operates, or outputs 8-bit data in a parallel manner.
The processor has 16-bit and 8-bit address and data lines, so the device has 216 bytes of memory, or 64KB.
This is made up of a single NMOS chip device with 6200 transistors.
There are 246 operational codes and 80 instructions in total.
Because the 8085 microprocessor has 8-bit input/output address lines, it can address up to 28 = 256 input and output ports.
This microprocessor is available in a DIP package of 40 pins
In order to transfer huge information from I/O to memory and from memory to I/O, the processor shares its bus with the DMA controller.
Recent Posts
-

@zainmuhammed Can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
You can put the GPS value on top of the loop or setup function.
Also, what kind of gateway are you using? Is it configured okay, OTA is done?
-

@salmanfaris Today I tried after connecting a 18650 cell,
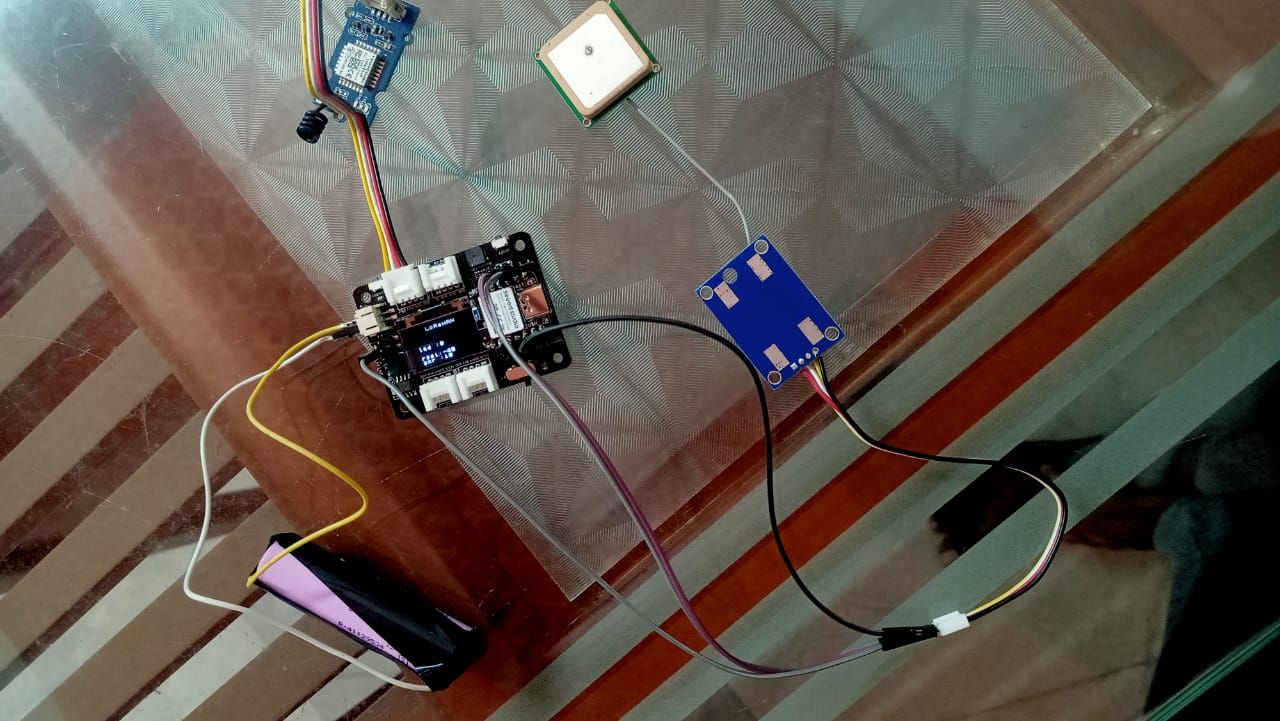
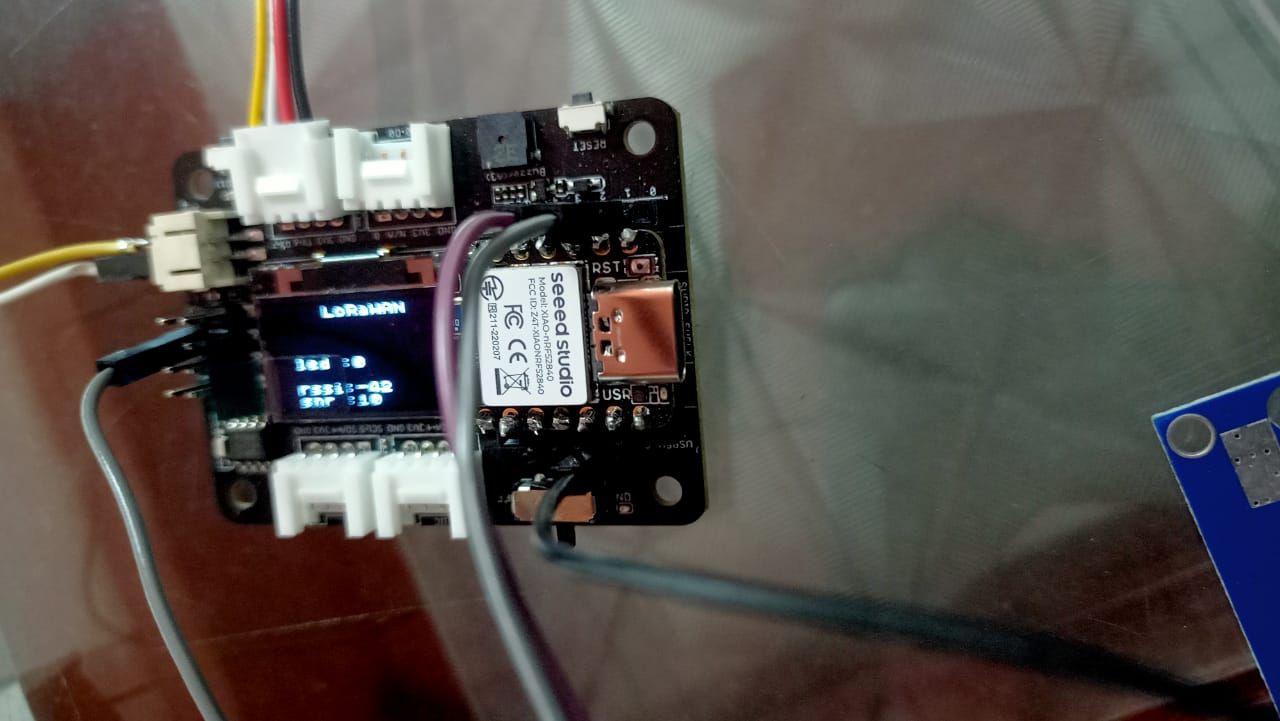
Data getting in console after integration of both lora and gps.

here you can see that GPS value is 0,0. also in my previous post you can see that GPS value is not reading.
Also the status LED is active after it is connected to the satellite. -
Hi @zainmuhammed ,
Can you share the GPS and LoRa output when it’s working?
Also can try capturing the GPS when the device is starting the loop instead after joining the LoRaWAN and see?
Also make sure the device provides have enough to modules. The GPS need more power when you cold start.