Error of compiling for the AI thinker esp-
-
I am working on an object detection since 2 weeks. I have started the project by a testing object using edge impulse to create the library based on this object but when i compile the code i have an error
That's the code:'''
#include <Parvesdomino-project-IPT_inferencing.h>
#include "edge-impulse-sdk/dsp/image/image.hpp"#include "esp_camera.h"
// Select camera model - find more camera models in camera_pins.h file here
// https://github.com/espressif/arduino-esp32/blob/master/libraries/ESP32/examples/Camera/CameraWebServer/camera_pins.h//#define CAMERA_MODEL_ESP_EYE // Has PSRAM
#define CAMERA_MODEL_AI_THINKER // Has PSRAM#if defined(CAMERA_MODEL_ESP_EYE)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 4
#define SIOD_GPIO_NUM 18
#define SIOC_GPIO_NUM 23#define Y9_GPIO_NUM 36
#define Y8_GPIO_NUM 37
#define Y7_GPIO_NUM 38
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 35
#define Y4_GPIO_NUM 14
#define Y3_GPIO_NUM 13
#define Y2_GPIO_NUM 34
#define VSYNC_GPIO_NUM 5
#define HREF_GPIO_NUM 27
#define PCLK_GPIO_NUM 25#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22#else
#error "Camera model not selected"
#endif/* Constant defines -------------------------------------------------------- */
#define EI_CAMERA_RAW_FRAME_BUFFER_COLS 320
#define EI_CAMERA_RAW_FRAME_BUFFER_ROWS 240
#define EI_CAMERA_FRAME_BYTE_SIZE 3/* Private variables ------------------------------------------------------- */
static bool debug_nn = false; // Set this to true to see e.g. features generated from the raw signal
static bool is_initialised = false;
uint8_t *snapshot_buf; //points to the output of the capturestatic camera_config_t camera_config = {
.pin_pwdn = PWDN_GPIO_NUM,
.pin_reset = RESET_GPIO_NUM,
.pin_xclk = XCLK_GPIO_NUM,
.pin_sscb_sda = SIOD_GPIO_NUM,
.pin_sscb_scl = SIOC_GPIO_NUM,.pin_d7 = Y9_GPIO_NUM, .pin_d6 = Y8_GPIO_NUM, .pin_d5 = Y7_GPIO_NUM, .pin_d4 = Y6_GPIO_NUM, .pin_d3 = Y5_GPIO_NUM, .pin_d2 = Y4_GPIO_NUM, .pin_d1 = Y3_GPIO_NUM, .pin_d0 = Y2_GPIO_NUM, .pin_vsync = VSYNC_GPIO_NUM, .pin_href = HREF_GPIO_NUM, .pin_pclk = PCLK_GPIO_NUM, //XCLK 20MHz or 10MHz for OV2640 double FPS (Experimental) .xclk_freq_hz = 20000000, .ledc_timer = LEDC_TIMER_0, .ledc_channel = LEDC_CHANNEL_0, .pixel_format = PIXFORMAT_JPEG, //YUV422,GRAYSCALE,RGB565,JPEG .frame_size = FRAMESIZE_QVGA, //QQVGA-UXGA Do not use sizes above QVGA when not JPEG .jpeg_quality = 12, //0-63 lower number means higher quality .fb_count = 1, //if more than one, i2s runs in continuous mode. Use only with JPEG .fb_location = CAMERA_FB_IN_PSRAM, .grab_mode = CAMERA_GRAB_WHEN_EMPTY,};
/* Function definitions ------------------------------------------------------- */
bool ei_camera_init(void);
void ei_camera_deinit(void);
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf) ;/**
-
@brief Arduino setup function
*/
void setup()
{
// put your setup code here, to run once:
Serial.begin(115200);
//comment out the below line to start inference immediately after upload
while (!Serial);
Serial.println("Edge Impulse Inferencing Demo");
if (ei_camera_init() == false) {
ei_printf("Failed to initialize Camera!\r\n");
}
else {
ei_printf("Camera initialized\r\n");
}ei_printf("\nStarting continious inference in 2 seconds...\n");
ei_sleep(2000);
}
/**
-
@brief Get data and run inferencing
-
@param[in] debug Get debug info if true
*/
void loop()
{// instead of wait_ms, we'll wait on the signal, this allows threads to cancel us...
if (ei_sleep(5) != EI_IMPULSE_OK) {
return;
}snapshot_buf = (uint8_t*)malloc(EI_CAMERA_RAW_FRAME_BUFFER_COLS * EI_CAMERA_RAW_FRAME_BUFFER_ROWS * EI_CAMERA_FRAME_BYTE_SIZE);
// check if allocation was successful
if(snapshot_buf == nullptr) {
ei_printf("ERR: Failed to allocate snapshot buffer!\n");
return;
}ei::signal_t signal;
signal.total_length = EI_CLASSIFIER_INPUT_WIDTH * EI_CLASSIFIER_INPUT_HEIGHT;
signal.get_data = &ei_camera_get_data;if (ei_camera_capture((size_t)EI_CLASSIFIER_INPUT_WIDTH, (size_t)EI_CLASSIFIER_INPUT_HEIGHT, snapshot_buf) == false) {
ei_printf("Failed to capture image\r\n");
free(snapshot_buf);
return;
}// Run the classifier
ei_impulse_result_t result = { 0 };EI_IMPULSE_ERROR err = run_classifier(&signal, &result, debug_nn);
if (err != EI_IMPULSE_OK) {
ei_printf("ERR: Failed to run classifier (%d)\n", err);
return;
}// print the predictions
ei_printf("Predictions (DSP: %d ms., Classification: %d ms., Anomaly: %d ms.): \n",
result.timing.dsp, result.timing.classification, result.timing.anomaly);
#if EI_CLASSIFIER_OBJECT_DETECTION == 1
ei_printf("Object detection bounding boxes:\r\n");
for (uint32_t i = 0; i < result.bounding_boxes_count; i++) {
ei_impulse_result_bounding_box_t bb = result.bounding_boxes[i];
if (bb.value == 0) {
continue;
}
ei_printf(" %s (%f) [ x: %u, y: %u, width: %u, height: %u ]\r\n",
bb.label,
bb.value,
bb.x,
bb.y,
bb.width,
bb.height);
}// Print the prediction results (classification)#else
ei_printf("Predictions:\r\n");
for (uint16_t i = 0; i < EI_CLASSIFIER_LABEL_COUNT; i++) {
ei_printf(" %s: ", ei_classifier_inferencing_categories[i]);
ei_printf("%.5f\r\n", result.classification[i].value);
}
#endif// Print anomaly result (if it exists)#if EI_CLASSIFIER_HAS_ANOMALY
ei_printf("Anomaly prediction: %.3f\r\n", result.anomaly);
#endif#if EI_CLASSIFIER_HAS_VISUAL_ANOMALY
ei_printf("Visual anomalies:\r\n");
for (uint32_t i = 0; i < result.visual_ad_count; i++) {
ei_impulse_result_bounding_box_t bb = result.visual_ad_grid_cells[i];
if (bb.value == 0) {
continue;
}
ei_printf(" %s (%f) [ x: %u, y: %u, width: %u, height: %u ]\r\n",
bb.label,
bb.value,
bb.x,
bb.y,
bb.width,
bb.height);
}
#endiffree(snapshot_buf);}
/**
-
@brief Setup image sensor & start streaming
-
@retval false if initialisation failed
*/
bool ei_camera_init(void) {if (is_initialised) return true;
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif//initialize the camera esp_err_t err = esp_camera_init(&camera_config); if (err != ESP_OK) { Serial.printf("Camera init failed with error 0x%x\n", err); return false; }// sensor_t * s = esp_camera_sensor_get();
// initial sensors are flipped vertically and colors are a bit saturated
//if (s->id.PID == OV3660_PID) {
// s->set_vflip(s, 1); // flip it back
// s->set_brightness(s, 1); // up the brightness just a bit
// s->set_saturation(s, 0); // lower the saturation
}#if defined(CAMERA_MODEL_M5STACK_WIDE)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
#elif defined(CAMERA_MODEL_ESP_EYE)
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
s->set_awb_gain(s, 1);
#endifis_initialised = true; return true;}
/**
-
@brief Stop streaming of sensor data
*/
void ei_camera_deinit(void) {//deinitialize the camera
esp_err_t err = esp_camera_deinit();if (err != ESP_OK)
{
ei_printf("Camera deinit failed\n");
return;
}is_initialised = false;
return;
}
/**
- @brief Capture, rescale and crop image
- @param[in] img_width width of output image
- @param[in] img_height height of output image
- @param[in] out_buf pointer to store output image, NULL may be used
-
if ei_camera_frame_buffer is to be used for capture and resize/cropping. - @retval false if not initialised, image captured, rescaled or cropped failed
*/
bool ei_camera_capture(uint32_t img_width, uint32_t img_height, uint8_t *out_buf) {
bool do_resize = false;if (!is_initialised) { ei_printf("ERR: Camera is not initialized\r\n"); return false; } camera_fb_t *fb = esp_camera_fb_get(); if (!fb) { ei_printf("Camera capture failed\n"); return false; }bool converted = fmt2rgb888(fb->buf, fb->len, PIXFORMAT_JPEG, snapshot_buf);
esp_camera_fb_return(fb);
if(!converted){
ei_printf("Conversion failed\n");
return false;
}if ((img_width != EI_CAMERA_RAW_FRAME_BUFFER_COLS) || (img_height != EI_CAMERA_RAW_FRAME_BUFFER_ROWS)) { do_resize = true; } if (do_resize) { ei::image::processing::crop_and_interpolate_rgb888( out_buf, EI_CAMERA_RAW_FRAME_BUFFER_COLS, EI_CAMERA_RAW_FRAME_BUFFER_ROWS, out_buf, img_width, img_height); } return true;}
static int ei_camera_get_data(size_t offset, size_t length, float *out_ptr)
{
// we already have a RGB888 buffer, so recalculate offset into pixel index
size_t pixel_ix = offset * 3;
size_t pixels_left = length;
size_t out_ptr_ix = 0;while (pixels_left != 0) { // Swap BGR to RGB here // due to https://github.com/espressif/esp32-camera/issues/379 out_ptr[out_ptr_ix] = (snapshot_buf[pixel_ix + 2] << 16) + (snapshot_buf[pixel_ix + 1] << 8) + snapshot_buf[pixel_ix]; // go to the next pixel out_ptr_ix++; pixel_ix+=3; pixels_left--; } // and done! return 0;}
#if !defined(EI_CLASSIFIER_SENSOR) || EI_CLASSIFIER_SENSOR != EI_CLASSIFIER_SENSOR_CAMERA
#error "Invalid model for current sensor"
#endif
'''and here is the error
'''
C:\Users\HP\AppData\Local\Temp.arduinoIDE-unsaved202486-9240-1p71wzh.ggfb\esp32_camera\esp32_camera.ino:382:2: error: #error "Invalid model for current sensor"
382 | #error "Invalid model for current sensor"
| ^~~~~
exit status 1Compilation error: #error "Invalid model for current sensor"
''' -
-
@Parves-DOMINO Did you able to solve the issue?
Recent Posts
-

@mahesh02 From the current Arduino ESP32 board files, we don't need to install the ESP-NN separately.
But try to choose the esp32 board version 3.1.3 and check, as I also faced issues with the latest esp32 board file.
-

This also happened to me when I was given a task from my company, So what I can recommend is:
Ensure that the correct board, "AI Thinker ESP32-CAM," is selected in the Tools menu of your Arduino IDE.
If the board is not listed, you may need to install it through the Board Manager. Search for "ESP32" and install the latest version.
Ensure that necessary libraries like ESP32-CAM, WiFi, and HTTPClient are installed. You can install them through the Library Manager.Carefully check your code for typos, missing semicolons, or incorrect syntax.
Verify that you're using the correct function names and parameters. -
Hi @PumpedMedusa, The rage is depends on the Antenna and how much TX power you have.
To choose antenna, first you need figure out - where your nodes will be, take a look at the below image. The antenna act like a "torch" if you have more dbi that mean it's focus will be increase and it can reach more distance but the angle it have it less, like a laser.
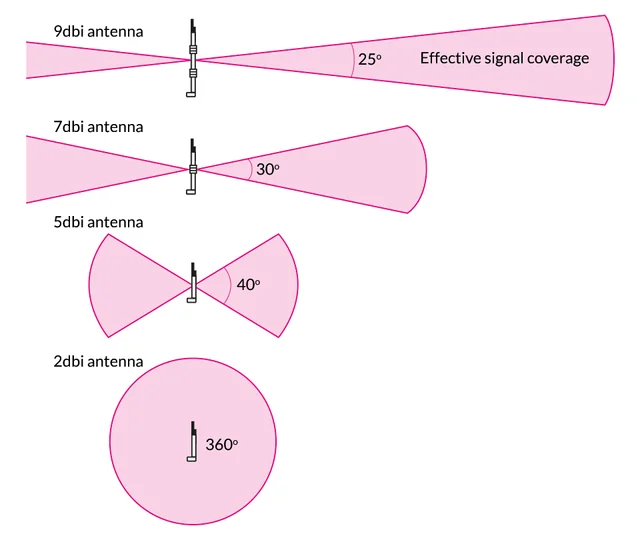
also, obstacle such as buildings, tress and mountains will affect the signal and deplete it.
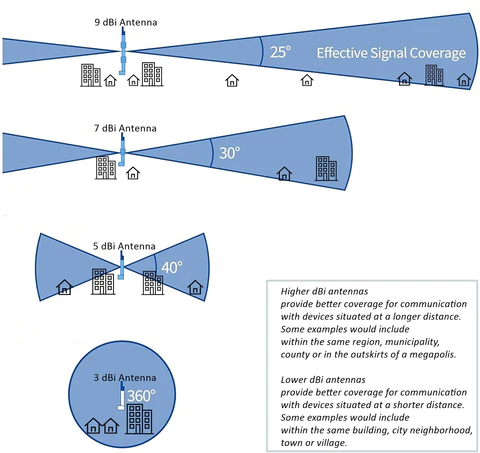
So, answer for you question - What is the best LoRa module to use for long distance network? - It's really depends on where you planning to put the nodes and how high you putting the gateway. Let me know know your thoughts.
-
@Parves-DOMINO Did you able to solve the issue?